
東京電力福島第1原発3号機で溶け落ちた核燃料(デブリ)の状況を把握するため、東電は7月19日にも、原子炉格納容器に水中遊泳式の調査ロボットを投入します。1、2号機内部調査(1〜3月)では、自走式ロボットや調査装置が堆積物に阻まれ、デブリを確認できませんでした。今回、廃炉作業の前提となるデブリの確認はできるのか・・。水中には、これまでにない困難も待ち受けています。
(唐沢俊治)
3号機の格納容器には、底から高さ的6・4メールまで放射能汚染水がたまっています。作業用の足場が水没しているため、水中ロボットを投入します。
水中ロボットは全長的30センチ、重さ的2キロ。推進用と昇降用の計五つのスクリューで動きます。前と後ろにカメラを搭載。放射線に対し累積的200シーベルトに耐えられる設計です。
地下階目指す
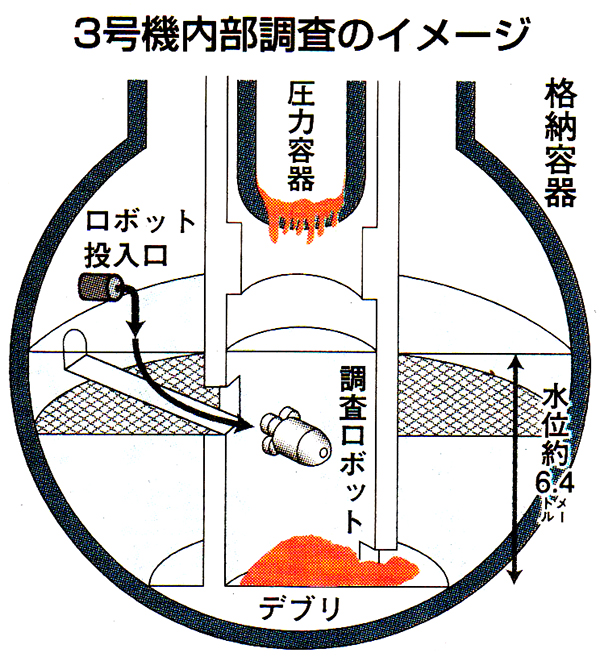
3号機は、核燃料の大半が圧力容器の底を抜けて、格納容器の床面に広がっていると東電はみています。
ロボットが向かう場所は、圧力容器の直下の作業用の足場。2号機はこの場所で、上部の制御棒を動かす装置などが溶け落ちたことにより、脱落やゆがみが確認されました。3号機では、より多くのものが上から落下したと考えられます。
ロボットは幅約60センチの隙間を通って地下階まで行く計画ですが、足場の損傷状況によっては進めない可能性があります。
今回の調査について東電は「今まで確認できていないものが見えれば“成功”だ」といいます。一方、懸念されるのは、構造物や堆積物との接触を避けながら進めるか、です。「ケーブルが後ろにつながっているロボットは、水中でバランスを取るのが難しい。行きだけでなく、帰りもケーブルが絡まないようにしなければいけない」と、東電福島第1廃炉推進カンパニーの増田尚宏プレジデントは話します。
先見えない道
内部調査を踏まえ、東電と国は今年、デブリ取り出しの大まかな方針を決める予定。格納容器を水で満たしデブリを取り出す「冠水工法」や、デブリが気中に露出した状態で取り出す「気中工法」などが検討されています。工法を決める上で、デブリの状況の把握は不可欠です。
事故から6年余りが経過したものの、内部の状況は一部を確認できたにすぎません。廃炉作業は文字通り、先が見えない困難な道のりです。
(「しんぶん赤旗」2017年7月14日より転載)
水中ロボ調査 19〜21日実施・・東電が発表
東京電力福島第1原発3号機で溶け落ちた核燃料(デブリ)の状況把握に向けた原子炉格納容器の内部調査について、東電は7月13日、水中ロボットを使った調査を19〜21日に実施すると発表しました。
圧力容器直下の作業用の足場の脱落や、制御棒を動かす装置などが損傷している可能性があるといいます。
19日は圧力容器を支える台座の内部をカメラで撮影。20日に、映像をもとに調査予定場所を再検討した上で、21日にロボットの再調査を実施するといいます。
(「しんぶん赤旗」2017年7月14日より転載)